1.A
2.B
3.A
4.B
5.A
6.B
7.A
8.A
9.A
10.B
11.B
12.A
13.B
14.B
15.A
16.A
2.B
3.A
4.B
5.A
6.B
7.A
8.A
9.A
10.B
11.B
12.A
13.B
14.B
15.A
16.A
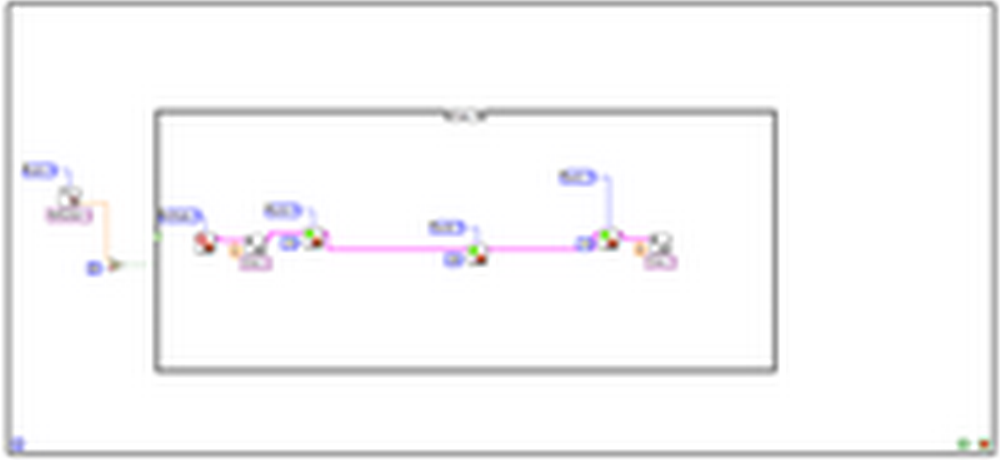
Get out of the box
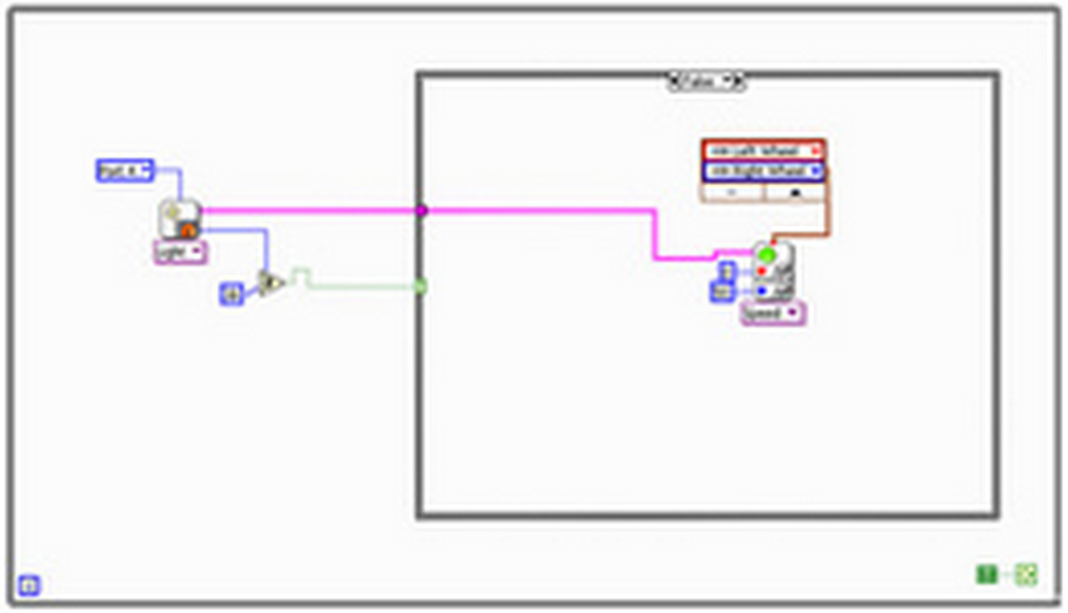
line follower
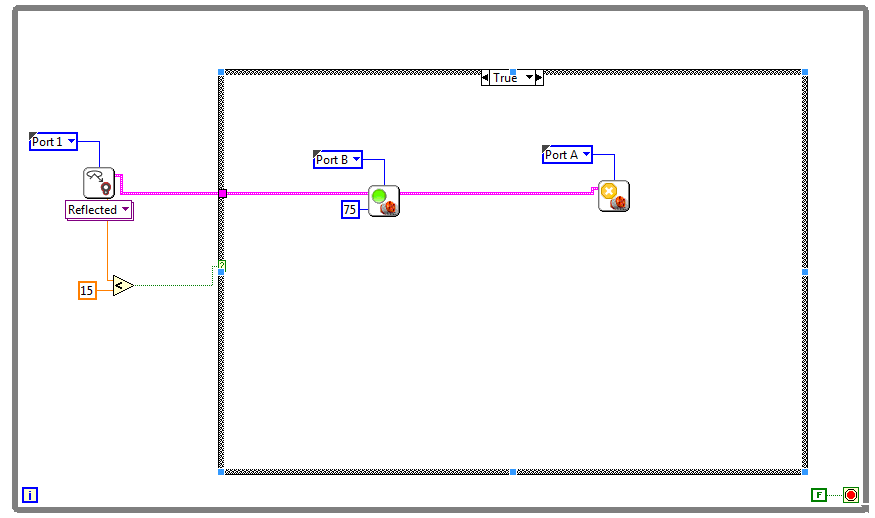
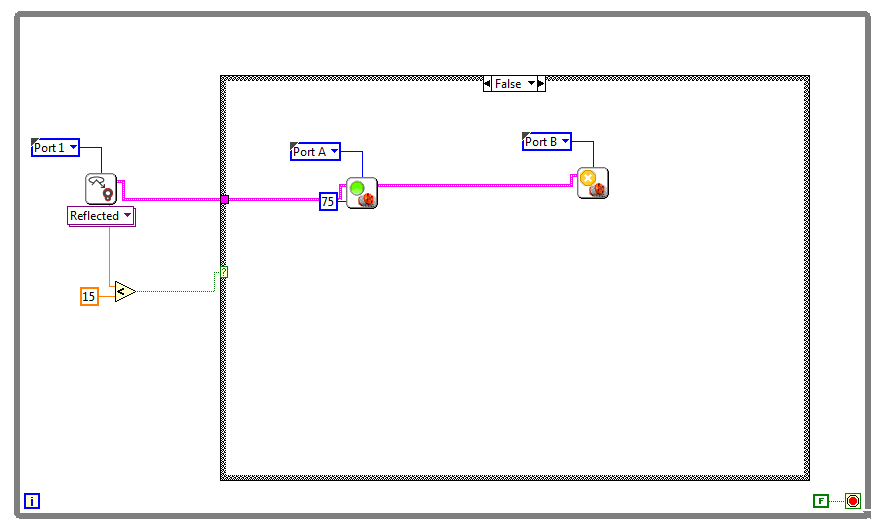
Roach Bot
PROGRAMS
1. Robot goes forward for 3.5 seconds then stops for 1.5 seconds. Then the robot turns because motor A is producing more power than B.
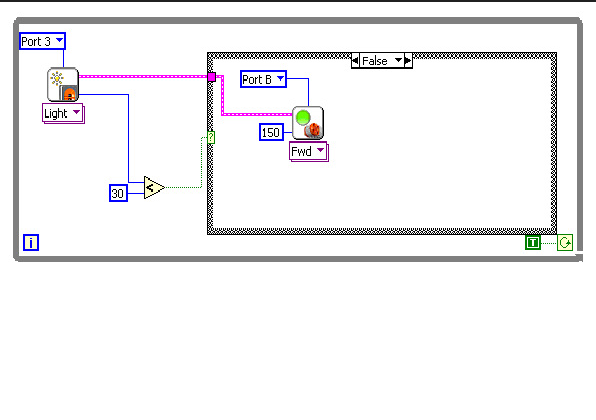
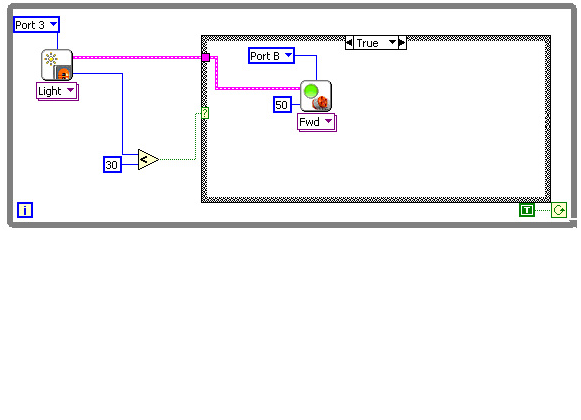
2. The robot starts out going forward while making a slight turn. Then if the sonar sensor reads less than 30, the robot makes a very sharp turn for a second.
3. The robot backs up while turning then backs up straight. Then if the light sensor reads greater than 42, the robot will go forward while turning, then go straight for 3 seconds.
4. Touch Sensor
5. Motor on
6. Sonic sensor measuring inches
7. While loop
8. Case Structure
9. Greater than
10. Stacked Sequence structure
11. Tells the amount of time the robot is doing something
12. Tools pallet
2. The robot starts out going forward while making a slight turn. Then if the sonar sensor reads less than 30, the robot makes a very sharp turn for a second.
3. The robot backs up while turning then backs up straight. Then if the light sensor reads greater than 42, the robot will go forward while turning, then go straight for 3 seconds.
4. Touch Sensor
5. Motor on
6. Sonic sensor measuring inches
7. While loop
8. Case Structure
9. Greater than
10. Stacked Sequence structure
11. Tells the amount of time the robot is doing something
12. Tools pallet
